
 EN
EN
 EN
EN ZH
ZH IT
IT ES
ES TH
TH TR
TR JA
JA PT
PT KO
KO RU
RU FR
FR DE
DE AR
AR
LZ5710 軽量低負荷遊星ジョイントモジュール
重量: 1420g±20g
極数: 42極
相数: 3相
駆動方式: FOC(フィールド指向制御)
減速比: 10:1
フルハードウェア FOC テクノロジー、チップレベルの FPGA 開発
中空ケーブル
全周波数20KHzのトリプルループ制御により高速応答を実現
etherCat/canOpen バス
1MHz サンプリングレートの 16 ビット ADC
パワーオフブレーキ
製品の核となる技術は、駆動制御一体設計のハーモニック統合ジョイントモジュールです。インナーロータ構造により中空ケーブル配線が可能となり、11、14、17、20、25、32、40シリーズなどの豊富なモデルオプションにより柔軟な用途に対応します。小型・小型化と低消費電力を実現し、電源喪失時に瞬時に機械的ロックがかかるピンタイプのブレーキ機構を採用しており、作動時間は10ms未満です。
クロスローラーベアリングとスチールホイールを統合したデュアルスチールホイール設計により、軸方向のスペース占有が削減されます。 2 つのスチール製ホイールを 1 つのフレクスプラインに噛み合わせることで、フレクスプラインの変形による応力を軽減し、スムーズな動作、高効率、最大 20 秒角の位置決め精度を実現します。
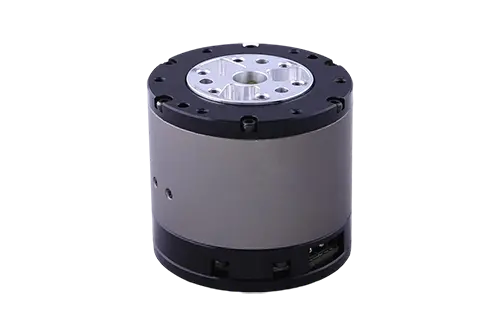
超小型軽量設計
外形寸法:直径Ø57mm×高さ46mm、重さわずか300gのコンパクトなジョイントモジュールです。
非中空構造のためシンプルな設計で低コストで、配線の不要な端部接続に適しています。
成熟したドライブおよび通信ソリューション
ドライブ モード: トルク、速度、位置のトリプル ループ制御を備えた FOC フィールド指向制御。高精度の関節制御に最適です。
通信: CAN/CAN FD インターフェース、主流のロボットコントローラーと互換性があり、配線が簡単、強力な干渉防止機能。
デュアル磁気エンコーダ構成: 磁気エンコーダ + デュアルエンコーダ、モータ側と出力側の両方でデュアル閉ループ制御をサポートし、位置決め精度を向上させます。
信頼性と環境適応性
温度範囲: -20 ~ 60°C、屋内から半屋外環境までの一般的な動作条件をカバーします。
騒音: ≤55 dB(A);低ノイズ設計で、人間とロボットのコラボレーション シナリオに最適です。
絶縁クラス:クラスB、長期的な動作信頼性を保証します。
軸受の種類: 深溝玉軸受、シンプルな構造、低メンテナンスコスト。
この LZ5710N は、軽負荷アプリケーション向けに設計された軽量、低電力、プラグアンドプレイのジョイント モジュールです。その主な利点には、3 Nm の定格トルク、わずか 7 分角の低バックラッシュ、FOC 駆動制御、CAN 通信、デュアル磁気エンコーダが含まれます。外骨格や協働ロボットのエンドエフェクター、手首、または足首のジョイントとして理想的に適しており、小型の教育および研究ロボットの迅速な開発にも最適です。
| モデル | LZ4610N 非中空 | LZ4605N 非中空 | LZ5710N 非中空 | LZ5740N 非中空 | LZ5736N 非中空 | LZ807.75N 非中空 | LZ8025CN 非中空 | LZ10028CH 中空軸 | LZ12028CH 中空軸 |
|---|---|---|---|---|---|---|---|---|---|
| 減速機の種類 | 惑星 | 惑星 | 惑星 | 惑星 | 惑星 | 惑星 | 惑星 | 惑星 | 惑星 |
| 駆動&制御方式 | FOC | FOC | FOC | FOC | FOC | FOC | FOC | FOC | FOC |
| 寸法 直径×高さ (mm) | Φ46×38 | Φ46×38 | Φ57×46 | Φ57×60 | Φ57×70 | Φ80×47 | Φ80×60.5 | Φ100×68 | Φ120×80 |
| ギア比 | 10 | 5 | 10 | 40 | 36 | 7.75 | 25 | 28 | 28 |
| 定格トルク(N・m) | 0.85N・m | 0.4N・m | 3.4Nm | 12Nm | 29Nm | 7.75Nm | 27Nm | 67.5Nm | 126Nm |
| 最大トルク(N・m) | 2.55Nm | 1.2Nm | 10.2Nm | 36Nm | 80Nm | 23.2Nm | 81Nm | 200Nm | 378Nm |
| 磁気エンコーダ | デュアルエンコーダー | デュアルエンコーダー | デュアルエンコーダー | デュアルエンコーダー | デュアルエンコーダー | デュアルエンコーダー | デュアルエンコーダー | デュアルエンコーダー | デュアルエンコーダー |
| 定格電力(W) | 83 | 30 | 94 | 94 | 300 | 400 | 380 | 733 | 1570年 |
| 定格電圧(V) | DC48V | DC48V | DC48V | DC48V | DC48V | DC48V | DC48V | DC48V | DC48V |
| 通信モード | CAN/CANFD | CAN/CANFD | CAN/CANFD | CAN/CANFD | CAN/CANFD | CAN/CANFD | CAN/CANFD | CANFD/イーサCAT | CANFD/イーサCAT |
| 使用温度範囲(℃) | -20~60℃ | -20~60℃ | -20~60℃ | -20~60℃ | -20~60℃ | -20~70℃ | -20~70℃ | -20~80℃ | -20~80℃ |
| 絶縁クラス | クラスB | クラスB | クラスB | クラスB | クラスB | クラスB | クラスB | クラスB | クラスB |
| 無負荷回転数(rpm) | 110 | 220 | 210 | 112 | 130 | 645 | 156 | 143 | 140 |
| 定格回転数(rpm) | 80 | 160 | 140 | 80 | 100 | 516 | 120 | 110 | 107 |
| 定格電流 (APK) | 1.3 | 4.5 | 3 | 6 | 8 | 10.4 | 10.7 | 22 | 41.6 |
| ピーク電流 (APK) | 3.8 | 13.5 | 9 | 9 | 16 | 20.8 | 30 | 66 | 83.2 |
| バックラッシ(arcmin) | ≤7分角 | ≤7分角 | ≤7分角 | ≤1分角 | ≤1分角 | ≤1分角 | ≤1分角 | ≤1分角 | ≤1分角 |
| 逆起電力定数 | 1.54V/krpm | 1.54V/krpm | 7.1V/krpm | 7.1V/krpm | 7.52V/krpm | 0.1528Vs/Rad | 7.45Vrms/krpm | 9Vrms/krpm | 8V/krpm |
| トルク定数 | 0.025Nm/A | 0.025Nm/A | 0.1N・m/A | 0.1N・m/A | 0.124Nm/A | 0.09143Nm/A | 0.15N・m/A | 0.15N・m/A | 0.12N・m/A |
| ステージ数 | 10 | 10 | 28 | 28 | 28 | 28 | 28 | 42 | 42 |
| コイル接続 | スター接続 | スター接続 | スター接続 | スター接続 | スター接続 | スター接続 | スター接続 | デルタ接続 | デルタ接続 |
| ベアリングの種類 | ボールベアリング | ボールベアリング | ボールベアリング | ボールベアリング | ボールベアリング | クロスローラーベアリング | クロスローラーベアリング | クロスローラーベアリング | クロスローラーベアリング |
| 動作騒音 (dB) | ≤55 | ≤55 | ≤55 | ≤58 | ≤60 | ≤65 | ≤65 | ≤65 | ≤70 |
| 重量(g) | 150 | 150 | 300 | 360 | 450 | 430 | 850 | 1550 | 2270 |
| フェーズ数 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 | 3 |

